Velocity Vortex
RESQ
|
During our second year of FTC our team had to adjust to the new control system, and expanded. Sam joined the team and provided much needed help with programming. Our main strategy approaching this challenge was to build a climbing robot. All of us on the team had always wanted to build a robot that could climb over obstacles. As for robot design, we chose to build a low and wide frame, that had a very good weight distribution. We used small servo arms to trigger the climber lines along the side of the mountain structure and we 3D printed our wheels. The wheels had radial spokes that would grip the bars on the mountain and pull us up to the next climbing zone. Thomas also designed an arm meant to pull the robot up onto the high bar, but it ended up being to heavy to use effectively. Sam did a great job with the programming and he added manual speed control to the remote, which proved to be extremely useful while climbing the mountain. In the end, we did not move on past the qualifying tournament in Kent Ohio, but we were chosen as an alliance partner in the first round of elimination matches, due to the remarkable consistency of our robot. All of us on the team learned a lot through FTC during this season, and are looking forward to next year!
|
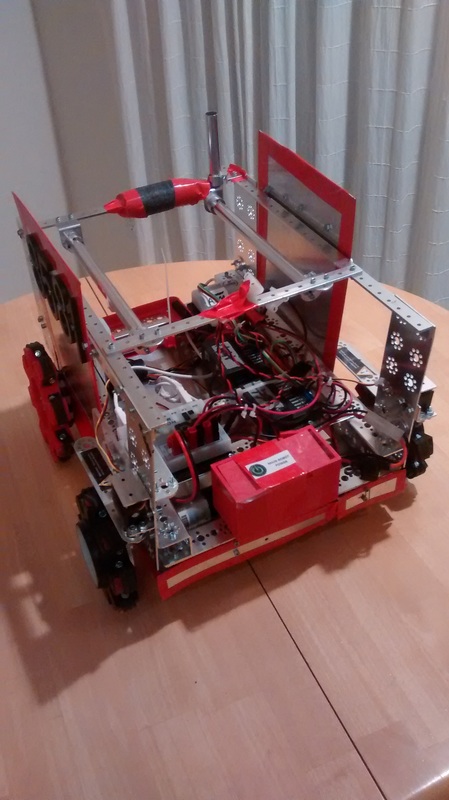
Here is our robot
|
